传统具备单一运动模式的移动机器人环境适应能力十分有限
两栖机器人提高了单一运动模式机器人的环境适应能力,但仍具有局限性
能否只投放一款机器人即可完成水陆空三种环境下的侦察或监测?
集萃智造三栖机器人可以灵活切换水、陆、空三栖全地形,依托超小型、超静音、超机动、高续航等优越性能,提供便携易用、稳定可靠、集群控制、察打结合的现代化侦察装备,提升特种环境下侦察能力。

仿生机理

仿风滚草地面滚动

仿蜻蜓空中飞行

仿水母水下游动
基于单一驱动方式实现三种运动模式
机械结构
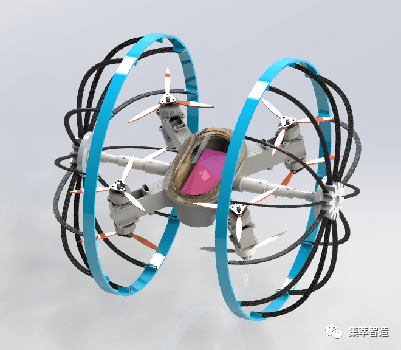
共轴八旋翼机构
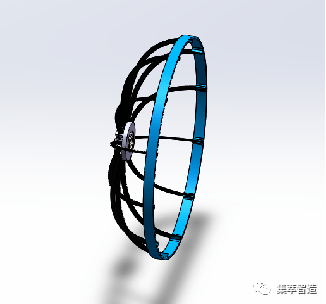
球柱形保护机构
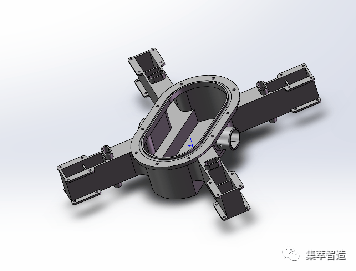
防水密封机构
动力学分析
基于牛顿第二定律与欧拉方程对三栖机器人进行了动力学建模,得出了机器人运动的加速度及角加速度输出与驱动电机输入之间的关系。该动力学模型同时适用于三栖机器人的空中飞行模式、水中运动模式和地面滚动模式,即实现了三种不同运动模式的动力学模型的统一。
控制系统

为了更加准确的表示三栖机器人的姿态且增加系统的鲁棒性,该系统的姿态环采用双环串级PID控制,外环采用角度PID控制器,内环采用角速度PID控制器,与传统的单环角度PID控制器相比,该控制系统抵抗外界干扰的能力更强,系统更加稳定。
创新点
能够自适应水陆空不同介质环境,通过核心旋翼机构的全向位置控制能够控制机器人的推力方向,便于实现机器人空中飞行、陆地滚动、水下潜行等功能。
提出轻量化结构设计和紧凑型电机驱动设计,将轻量化车身作为产品的核心性能指标,确保三栖机器人能够灵活机动并确保续航能力。电机作为快速路面驱动核心,与旋翼共同构成动力、转向的联合控制系统。
将多旋翼飞行器和伞状轮式机构之间的连接轴设计成可伸缩结构,使其可以迅速便捷地压缩和展开,提高便携性。
提出超静音设计,利用轻量化车身与旋翼提供静音控制,同时加入主动降噪模块减少高频噪音,实现超静音能力。
应用领域
01
侦察勘测
该机器人可广泛用于特定环境下的侦察,如水下蛙人伴潜、反恐排爆、城市巷战、港口侦察等。
02
察打一体
与地面无人信息平台、智能指挥中心等形成察打一体化模式,融合目标识别定位、机器人集群控制、多机协同、人机交互等多领域交叉技术,以侦察信息为主线快速形成指挥计划与部署,打造察打一体的多信息融合系统。
03
灾害救援
该机器人还可广泛用于水、陆、空环境下的民事应用,如灾害(地震灾害、危化品爆炸灾害、洪涝灾害等)现场的环境探查、人员搜救、灾害评估等。
技术参数
该成果应用于复杂环境下的侦查感知、察打结合的场合,增强远程遥操作信息侦察、复杂环境越障能力,采用轻量化机身设计、旋翼驱动与电机驱动相结合等设计,可搭载激光测距、视觉设备、音频设备、气体检测设备等侦察设备,可作为察打一体化设备组件,为我国特殊应用环境提供信息侦测能力,可配备作为人员便携易用辅助设备,执行监视、搜索等任务。