据deep tech消息,加州大学圣地亚哥分校的工程师们创造了一种轻便、低成本的四足软体机器人,它通过气动回路就能保持系统控制和运动,并且不需要任何电子设备驱动。加州大学圣地亚哥分校 Dylan Drotman 博士表示:“这项工作代表着向完全自主、无电子行走机器人迈出了重要的一步。”
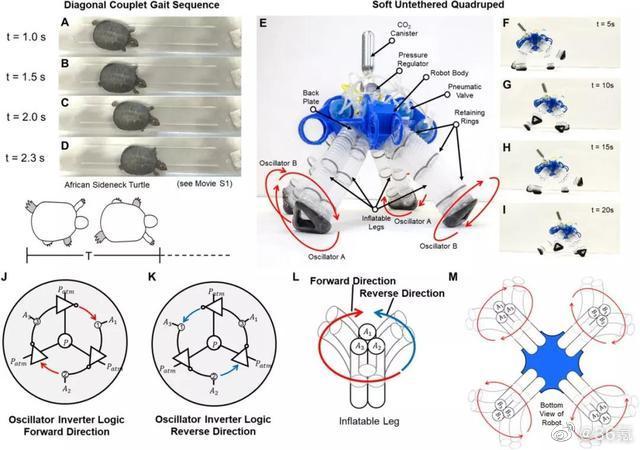
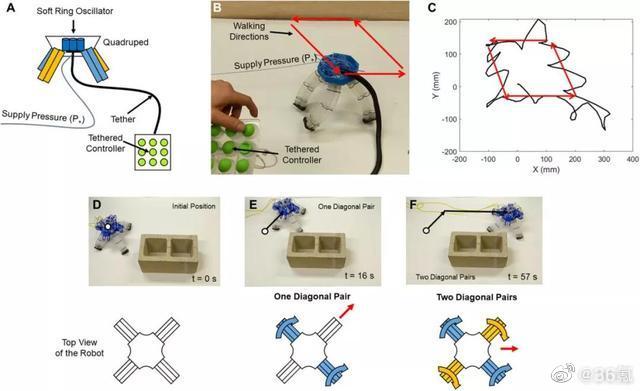
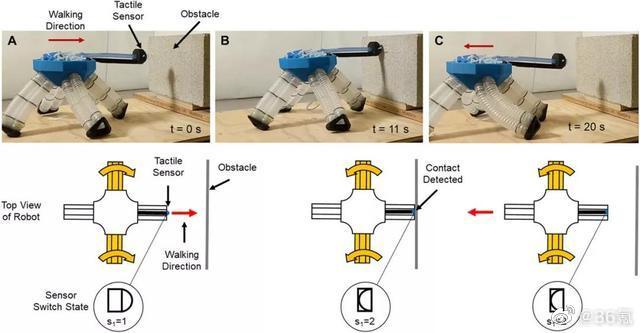
该项目软体机器人则不同,它的气动电路系统控制由管子和软阀组成,可根据指令或从环境中感应到的信号进行判断,进而行走。机器人由脊柱驱动,计算能力与哺乳动物的反射相似。研究团队的灵感来自动物体内发现的神经回路,通过产生节奏来控制步行和跑步等动作。
研究团队在气动阀的振荡器和传感器的基础上,又添加了实现高级功能(如行走)所需的组件。气动阀具有价格便宜、重量轻的优势,并且相对于与机电阀更易于制造,通常用于控制软体机器人。概括来说,本次研究是低成本机器人技术的突破,这种软体机器人可应用在矿井和核磁共振成像机等电子设备无法使用的领域。研究团队表示,希望在这项研究的基础上,能够改进机器人的步态,让它能在更崎岖的地面也能实现自由行走。