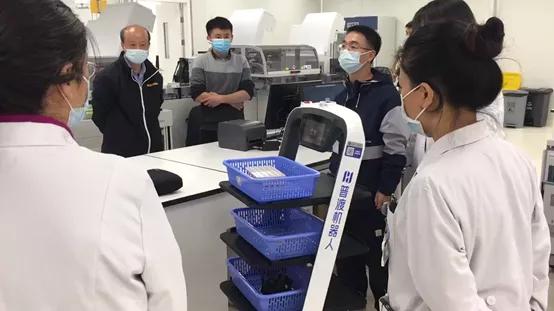
上述图中的机器人主要由阻燃抗静电表面皮肤、机器人关节电机、系统组成。其中机器人关节电机又分为动力部分、减速部分和驱动系统,直白说:系统每发出一个指令,驱动系统都要准确执行,并误差在0.1毫米以内,包括响应时间和空间位置等等,目前机器人的关节电机核心技术国内还比较稀少,基本都在美、日手里,当然国内也有一些电机的厂家,但大多外形很大,无法应用在人形机器人上面。
机器人系统:目前大多都是在ROS开源系统上面建立的,ROS起源是斯坦福大学的一个实验室,虽然开源可创造性也很强大,但是没有公司背景,所产生的漏洞也非常多,造成系统运行不稳定的情况也非常多。
目前国内是有个别机器人系统厂商在做机器人系统的,但是苦于产业不成熟,开发者不多,系统很难有进步和发展。
不过,今日十四五机器人产业发展规划的发布给机器人产业带来了大利好,旨在技术攻关和突破机器人系统开发、仿生感知、生机电融合等前沿技术。